Space automation
The implementation of space robotics and autonomous processes in orbiting satellite is on of the key factors in the improvement of its operative life. For this reason, the group is studying several technologies to enable this. Among the technologies, there are capture and docking systems, and vehicle that can reproduce the behavior of space robots.
All the aspects are developed and tested in two ways: numerical and experimental.
In-Orbit-Servicing: docking/capture systems
 The capturing systems are a crucial point for the In-Orbit-Servicing missions, since they allow the mechanical, electrical, data and heat connection between the client and the servicer spacecrafts. The research group has developed diverse smart capture and docking systems. Their key point is to be autonomous systems able to execute all a set of tasks that make them independent from the rest of the spacecraft. Among these tasks, there are the estimation of the pose of the target vehicle through dedicated sensors and algorithms, the execution of guidance algorithm and the control of the actuators to eneble the mechanical connection.
The capturing systems are a crucial point for the In-Orbit-Servicing missions, since they allow the mechanical, electrical, data and heat connection between the client and the servicer spacecrafts. The research group has developed diverse smart capture and docking systems. Their key point is to be autonomous systems able to execute all a set of tasks that make them independent from the rest of the spacecraft. Among these tasks, there are the estimation of the pose of the target vehicle through dedicated sensors and algorithms, the execution of guidance algorithm and the control of the actuators to eneble the mechanical connection.
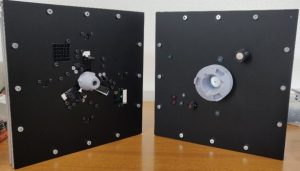
In the framework of the Space Rider Observer Cube (SROC) mission, the research group has developed DOCKS, a smart docking system for space vehicles. DOCKS is suitable for use onboard micro- and nanosatellites and merges a classical probe drogue configuration with a gripper–like design, to manage the connection between the parts. The system is equipped with a suite of sensors to estimate the relative pose of the target and with a dedicated computer, making it a smart standalone system.
In-Orbit-Servicing: numerical simulations
 The “GNC and Robotic Arm Combined Control” (GRACC) research activity aims at the development of the navigation and control subsystems of a Guidance, Navigation and Control (GNC) system for controlling an autonomous satellite equipped with a redundant manipulator. The study is conducted under ESA contract by a consortium of italian universities composed by teams from the Università degli Studi di Padova, the Politecnico di Milano and the Università degli Studi di Napoli “Federico II”.
The “GNC and Robotic Arm Combined Control” (GRACC) research activity aims at the development of the navigation and control subsystems of a Guidance, Navigation and Control (GNC) system for controlling an autonomous satellite equipped with a redundant manipulator. The study is conducted under ESA contract by a consortium of italian universities composed by teams from the Università degli Studi di Padova, the Politecnico di Milano and the Università degli Studi di Napoli “Federico II”.
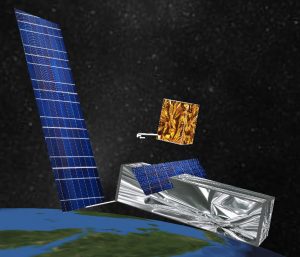
In the study, the capture operations of a target spacecraft and its stabilization are considered. The control function employs a combined control strategy: the chaser satellite actuators and the robotic arm joint motors are degrees of freedom of the same control plant. A numerical simulator capable of representing the dynamics of the system (chaser, manipulator, target) in orbit is developed in the MATLAB/Simulink environment to validate the developed GNC algorithms. The GNC system has been tested in three relevant In–Orbit Servicing (IOS)/Active Debris Removal (ADR) scenarios: (1) the servicing of a large GEO platform (2) the servicing of a small satellite in LEO and (3) the removal of a large LEO satellite (ENVISAT). The GNC algorithm has reached a TRL of 4; the team is working to reach a TRL of 6.
Information on facilities and laboratories can be found on the dedicated page.
