Space Automation
The group has developed several technologies and facilities with the purpose to improve the robotics automation in space.
The space robotics is studied in two different ways that have produce two different environments:
-
- Numerical simulator. In the last years, the group has collaborate with ESA in order to develop a virtual environment to tests Guidance Navigation and Control algorithms for space robotics.
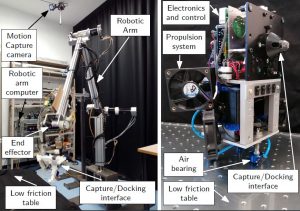
- Experimental validation. The numerical simulations are tested with real hardware (which is representative of that used in satellites) through experimental campaign.

CISAS Hypervelocity Impacts facility
The CISAS hypervelocity impacts facility is based on a two-stage light gas gun (LGG), which can achieve a high daily firing rate with low operating costs. The gun is capable of accelerating projectiles up to 100 mg at a maximum speed of 5.5 km/s; up to 10 experiments per day can be achieved due to a specific setup which employs reusable components. The projectile velocity is measured by two laser optical barriers placed just before the impact chamber; a high-velocity camera is placed on one side of the impact chamber and is employed to record impact videos. In addition, dedicated sensors can be added to instrument the target depending on the experimental setup (e.g., accelerometers, acoustic sensors, ballistic pendulum).
Impact test campaigns include the assessment of collision-induced vibrations and damages on space systems, the verification of shields, the analysis of materials response to hypervelocity impacts, and the investigation of fragmentation phenomena.
CISAS “G. Colombo” Centre of Studies and Activities for Space website
CISAS laboratories for the qualification of space components
The laboratories dedicated to the qualification of space components have been continuously updated to meet the needs dictated by participation in national and international space programs mainly in AIV activities and on qualification tests for sensors and instrumentation. The laboratories house clean rooms (from class 10000 to class 100), climatic chambers for thermal vacuum tests with temperature control in the range of 80-420 K and a control volume of about 1000 liters, and electrodynamic shakers capable of performing mechanical tests with sine, random and shock excitation.
CISAS Horizontal TV chamber: this chamber is used for experiments in High vacuum conditions.
|
Internal Volume
|
Max: Diameter 900 mm – Length 900 mm (Without internal baseplate) Nominal: Height 570 mm – Length 900 mm (With internal baseplate) |
|
Thermal control (Cooling)
|
Controlled Nitrogen flow in a dedicated cryostat (Achieved Cryostat temperature around -190°C) |
|
Thermal control (Heating)
|
3 PID-controlled thermal resistance circuits ( Max Current 15 A) |
|
Available temperature sensors (pt 100)
|
30
|
|
Achievable Internal Absolute Pressure
|
< 5 10-5 mbar
|
|
Available interfaces on external flanges
|
BNC, DB9, DB25, USB ..configurable using different flanges
|

CISAS Horizontal TV chamber- Detail of interfaces on lateral flanges.
(configurable using different flanges)
|
CISAS Horizontal TV chamber (left) and view of the internal cryostat with the thermally controlled baseplate. |
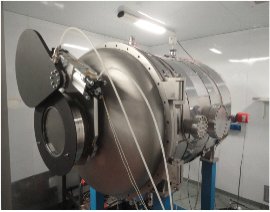
CISAS vertical TV chamber: CISAS vertical TV chamber is used for experiments in Vacuum conditions when a bigger internal volume is needed (for example for testing Lunar drilling payloads).
|
CISAS Vertical TV chamber
|

Electrodynamic shakerThe electrodynamic shaker has a maximum force up to 10 kN in the frequency range 5-5000 Hz and is use to perform sine, random and SRS shock tests on space equipment for qualification and acceptance processes. Solar simulatorThe designed solar simulator can reproduce the intensity and spectral distribution of the Sun’s radiation up to 10 Solar constants and has been installed near a Thermal Vacuum Chamber provided with a viewport in order to be able to test the performance of any space equipment under a range of pressure and temperature conditions, including different intensities of sunlight and different angles of incidence. |

Electrodynamic shaker |
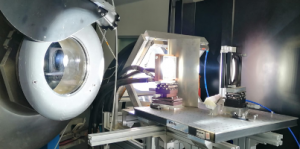 Solar Simulator
Solar Simulator
