MORPHEUS rover is equipped with a range of technologies that enable autonomous navigation across various terrains, including rugged and rocky landscapes. Its sensor suite includes a stereo camera and LiDAR sensors for mapping and analyzing the surrounding terrain. The rover is also equipped with a GNSS RTK system, which serves as a ground truth reference for evaluating the metrological performance of ego-motion algorithms. By combining onboard algorithms and machine learning techniques, the rover can identify and navigate around obstacles, ultimately finding the most efficient path to its destination.
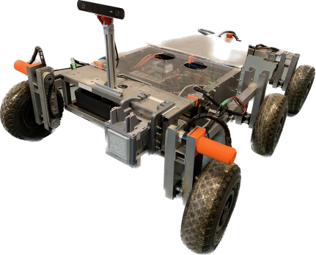
The rover’s platform is a six-wheel skid steering design, offering agility ranging from point turning to line driving with minimal actuators. Each wheel, powered by a brushless motor and transmission belt mechanism, ensures robust traction on the terrain. Measuring 820 × 130 × 1000 mm and weighing approximately 34 kg, MORPHEUS utilizes Maxon DEC Module 50/5 motor controllers, capable of controlling EC motors with Hall sensors outputting up to 250 watts. Its Maxon EC-max 30 motors are brushless, 60 watts, and equipped with Hall sensors, paired with a 86:1 gear ratio planetary gearhead.
At the core of its operations is an NVIDIA Jetson TX2 board, featuring a hex-core ARMv8 CPU, a 256-core Pascal GPU, and 8GB RAM. Running on a 64-bit release of Ubuntu 16.04.6 LTS Xenial Xerus, this robust setup powers MORPHEUS’s computational tasks.
